INSTRUMENTACION
INDUSTRIAL
Informe
Control PID

Un controlador PID es un
mecanismo de control por realimentación ampliamente usado en sistemas de
control industrial. Este calcula la desviación o error entre un valor medido y
un valor deseado.
El algoritmo del control PID
consiste de tres parámetros distintos: el proporcional, el integral, y el
derivativo. El valor Proporcional depende del error actual. El Integral depende
de los errores pasados y el Derivativo es una predicción de los errores
futuros. La suma de estas tres acciones es usada para ajustar al proceso por
medio de un elemento de control como la posición de una válvula de control o la
potencia suministrada a un calentador.
Cuando no se tiene conocimiento
del proceso, históricamente se ha considerado que el controlador PID es el
controlador más adecuado. Ajustando estas tres variables en el algoritmo de
control del PID, el controlador puede proveer una acción de control diseñado
para los requerimientos del proceso en específico. La respuesta del controlador
puede describirse en términos de la respuesta del control ante un error, el
grado el cual el controlador sobrepasa el punto de ajuste, y el grado de
oscilación del sistema. Nótese que el uso del PID para control no garantiza
control óptimo del sistema o la estabilidad del mismo.


Algunas aplicaciones pueden solo
requerir de uno o dos modos de los que provee este sistema de control. Un
controlador PID puede ser llamado también PI, PD, P o I en la ausencia de las
acciones de control respectivas. Los controladores PI son particularmente
comunes, ya que la acción derivativa es muy sensible al ruido, y la ausencia
del proceso integral puede evitar que se alcance al valor deseado debido a la
acción de control.
Para el correcto funcionamiento
de un controlador PID que regule un proceso o sistema se necesita, al menos:
- Un sensor, que determine el estado del sistema (termómetro, caudal metro, manómetro, etc.).
- Un controlador, que genere la señal que gobierna al actuador.
- Un actuador, que modifique al sistema de manera controlada (resistencia eléctrica, motor, válvula, bomba, etc.).
El controlador resta la señal de
punto actual a la señal de punto de consigna, obteniendo así la señal de error,
que determina en cada instante la diferencia que hay entre el valor deseado
(consigna) y el valor medido. La señal de error es utilizada por cada uno de
los 3 componentes del controlador PID. Las 3 señales sumadas, componen la señal
de salida que el controlador va a utilizar para gobernar al actuador. La señal
resultante de la suma de estas tres se llama variable manipulada y no se aplica
directamente sobre el actuador, sino que debe ser transformada para ser
compatible con el actuador utilizado.
Las tres componentes de un
controlador PID son: parte Proporcional, acción Integral y acción Derivativa.
El peso de la influencia que cada una de estas partes tiene en la suma final,
viene dado por la constante proporcional, el tiempo integral y el tiempo
derivativo, respectivamente. Se pretenderá lograr que el bucle de control
corrija eficazmente y en el mínimo tiempo posible los efectos de las
perturbaciones.
--------------------------------------------------------------------
Proporcional
La parte proporcional consiste en
el producto entre la señal de error y la constante proporcional para lograr que
el error en estado estacionario se aproxime a cero, pero en la mayoría de los
casos, estos valores solo serán óptimos en una determinada porción del rango
total de control, siendo distintos los valores óptimos para cada porción del
rango.

Integral
El modo de control Integral tiene
como propósito disminuir y eliminar el error en estado estacionario, provocado
por el modo proporcional. El control integral actúa cuando hay una desviación
entre la variable y el punto de consigna, integrando esta desviación en el
tiempo y sumándola a la acción proporcional. El error es integrado, lo cual
tiene la función de promediarlo o sumarlo por un período determinado; Luego es
multiplicado por una constante Ki. Posteriormente, la respuesta integral es
adicionada al modo Proporcional para formar el control P + I con el propósito
de obtener una respuesta estable del sistema sin error estacionario.

Derivativo
La acción derivativa se
manifiesta cuando hay un cambio en el valor absoluto del error; (si el error es
constante, solamente actúan los modos proporcional e integral).
El error es la desviación
existente entre el punto de medida y el valor consigna, o "Set
Point". La función de la acción derivativa es mantener el error al mínimo
corrigiéndolo proporcionalmente con la misma velocidad que se produce;
De esta manera evita que el error se
incremente. Se deriva con respecto al tiempo y se multiplica por una constante
D y luego se suma a las señales anteriores (P+I). Es importante adaptar la
respuesta de control a los cambios en el sistema ya que una mayor derivativa
corresponde a un cambio más rápido y el controlador puede responder
acordemente.


Ejemplos de usos=
- Se desea controlar el caudal de un flujo de entrada en un reactor químico. En primer lugar se tiene que poner una válvula de control del caudal de dicho flujo, y un caudal metro, con la finalidad de tener una medición constante del valor del caudal que circule. El controlador irá vigilando que el caudal que circule sea el establecido por nosotros; en el momento que detecte un error, mandará una señal a la válvula de control de modo que esta se abrirá o cerrará corrigiendo el error medido. Y tendremos de ese modo el flujo deseado y necesario. El PID es un cálculo matemático, lo que envía la información es el PLC.
- Se desea mantener la temperatura interna de un reactor químico en su valor de referencia. Se debe tener un dispositivo de control de la temperatura (puede ser un calentador, una resistencia eléctrica,...), y un sensor (termómetro). El P, PI o PID irá controlando la variable (en este caso la temperatura). En el instante que esta no sea la correcta avisará al dispositivo de control de manera que este actúe, corrigiendo el error. De todos modos, lo más correcto es poner un PID; si hay mucho ruido, un PI, pero un P no nos sirve mucho puesto que no llegaría a corregir hasta el valor exacto.
--------------------------------------------------------------------
Descripción
de práctica
Programación y
simulación de algoritmo PID en el MICROCONTROLADOR
El objetivo de esta actividad es
el desarrollo del programa que realiza el sistema de monitoreo y control PID de
un sistema térmico. Con las habilidades y competencias adquiridas, durante el
desarrollo del proyecto el aprendiz estará en capacidad de diseñar e
implementar un sistema micro controlado, Identificando cada uno de los
subsistemas que lo componen y sus
características principales. El aprendiz basado en las diferentes respuestas en
el simulador del controlador Proporcional, Proporcional-Derivativo,
Proporcional-Integral-Derivativo, analizará dichos resultados para así conocer
cada uno de los efectos de los distintos parámetros de ajuste de dicho
controlador.
Desarrolle el programa en MIKROC basado en el algoritmo
mostrado en la figura. Implemente el Hardware en PROTEUS y ajuste el programa
basado en simulaciones.




Fundamentación teórica.
Presentación de conceptos de control y contextualización del proyecto
Esta actividad tiene como
propósito que el aprendiz obtenga la
fundamentación teórica que envuelve la teoría del control. Utilizando el
material de apoyo para realizar su investigación el aprendiz realiza una
exposición donde el mismo desarrolla cada uno de los conceptos propuestos y con
la guía del instructor disipa dudas y contextualiza el trabajo en el desarrollo
del proyecto

Prepare una exposición basada en
el Glosario propuesto por el Instructor, donde exponga los conceptos planteados
en un diagrama de flujo que permita ubicar cada uno de estos términos en el
proyecto planteado al inicio de la guía; Diseño de controlador automático PID.
Cada exposición se realizará en un foro de discusión donde se desarrollarán y
aclararan los conceptos.
Conceptos básicos:
Sistema, Planta o proceso,
Control, Entrada/Salida del sistema de
Control, Entrada de referencia, Perturbación, Sistema de control realimentado,
Sistema de Control en lazo abierto y lazo cerrado, Sistema en el dominio del
tiempo y la frecuencia, función de transferencia.
--------------------------------------------------------------------
Actividad 3.2.3
Caracterización de la planta
térmica
Esta actividad pretende integrar
las actividades anteriores de desarrollo de hardware y software con los
conceptos de control y las estrategias para el desarrollo del diseño del
controlador PID propuesto. El aprendiz construirá en el simulador un sistema
térmico del cual extraerá la función de transferencia y sobre el cual realizará
los procedimientos de ajuste y simulación para verificar su correcto desempeño.
Realice
una simulación en PROTEUS de una planta térmica, obtenga la función de transferencia a través de
la respuesta de la planta a una entrada escalón (10%-20% de la entrada
nominal) en lazo abierto



--------------------------------------------------------------------
Diagrama de flujo
para implementación de MICROCONTROLADOR

--------------------------------------------------------------------
Obtención
de datos para el control PID




- · t 0= 10 segundos
- · t 1= 11 segundos
- · t 2= 25 segundos

- · P= Presente = proporcional al error
- · I= Pasado = Porporcional a la integral del error
- · D= Futuro= proporcional ala derivativa al error
Función de Trasferencia
·
P= proporcional= KP
·
I= integral = Ki
·
D= derivativo = Kd

Código
Fuente


--------------------------------------------------------------------
Simulación

7 Simulaciones
=
- · a+, a-
- · b+, b-
- · c+, c-
- · control PID con alto voltaje
ACP
= acción de control proporcional
ACI
= acción de control integral
ACD=
acción de control derivativa
Acción
de control proporcional aumentar y disminuir a (KP)
ACP=A*ERROR;
a
- de 0,09882


a
+ de 0.39528


Acción
de control integral aumentar y disminuir b (Ti)
ACI=b*ERROR
+ I anterior;
B-
0,004866



B+
0,019464


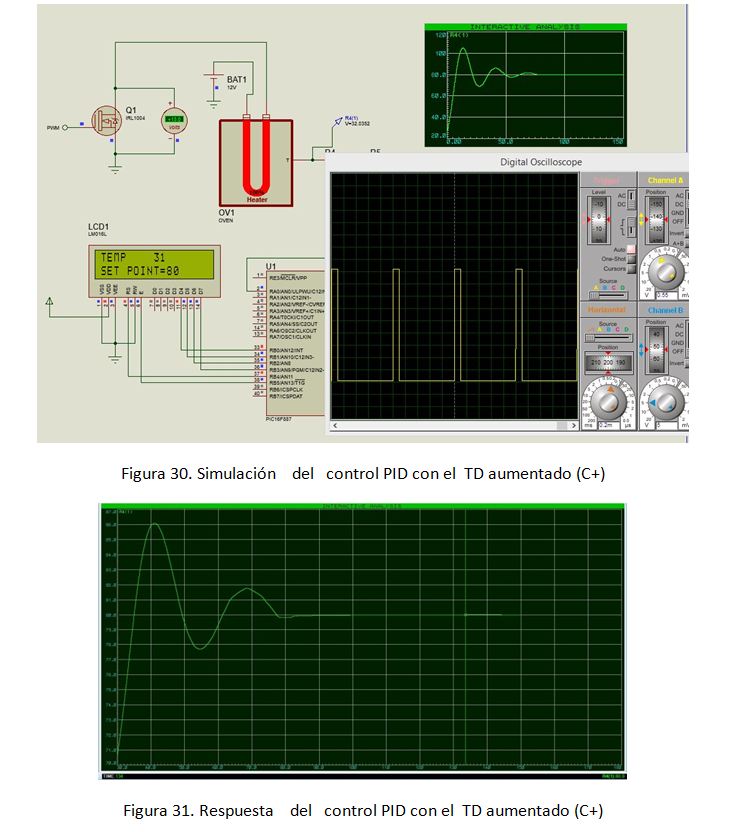
Acción
de control derivativa aumentar y disminuir c (TD)
ACD=0.9882*(ERROR-ERROR_
Anterior);
c- 0,4941


C
+1,9764

PID
FULL


Control
PID


--------------------------------------------------------------------
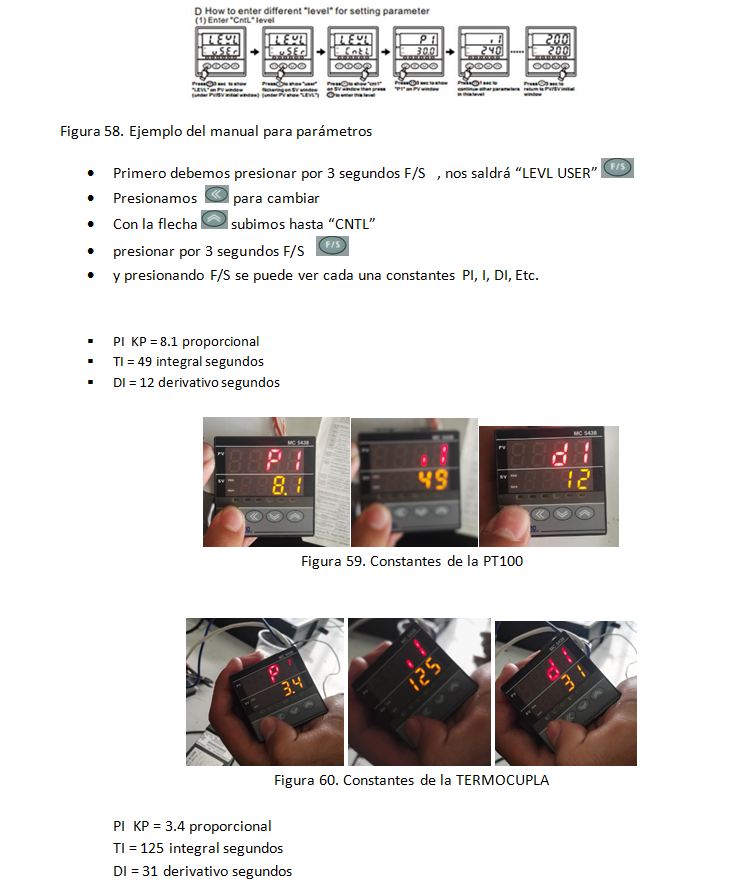
Tutorial
de uso MAXTHERMO mc 5438
Control de temperatura MAXTHERMO
MC5438

- . el SET EVALUE (S. V.) o SET POINT del PID MAXTHERMO
- . entrada del controlador PT100 y TERMOPAR
- . función AUTOTUNING ( obtener las constantes KP,TI y TD)


Para energizar, conectar el cable
de poder en los 1 y 2
El SET EVALUE (S. V.) o SET POINT del PID
MAXTHERMO



Entrada del
controlador PT100 y TERMOPAR
Previamente configurado el SET
POINT debemos primero conectar la PT100
o la TERMOCUPLA
En el esquema de
conexiones del MAXTHERMO las entrada para
los sensores que vamos a conectar se hacen en el 10, 11 y 12 de la siguiente
forma =
o Conexión
de sensor PT100, el rojo en A pin 10 y los 2 blancos en B, 11 y 12
o Conexión
de la TERMOCUPLA en el 11 y 12. Si al
momento de configurado el sensor va disminuyendo la temperatura, está mal
conectada, simplemente invertir las dos puntas

Previamente configurado el SET
POINT y conectado nuestro sensor, debemos configurar el sensor conectado




Conclusiones
De
esta práctica aprendimos nuevos conceptos y Matemáticas, todo sobre derivativo
e integral. Del control PID aprendimos que es mejor este control y más exacto,
solo que para nosotros fue un poco más complicado el PID por la obtención del
proporcional, el integral, y el derivativo, peor sin embargo después de tener
los conceptos claros no se vuelve tan difícil. De los 3 controles este es el
más preciso ya que lo mantiene en el SET POINT preciso sin más y menos, se
mantiene exacto en este caso en la temperatura que fijamos. De las simulaciones
sacamos las siguientes conclusiones, cuando solo dejamos el Proporcional y
empezamos a subir el KP y bajarlo, el control no pudo llegar hasta el SET POINT
de 80 solo llegaba hasta aproximadamente 50 0 70 y con oscilaciones; con el
proporcional y subiendo y bajando la integral notamos que ya podía llegar hasta
el SET POINT aunque este presentaba oscilaciones; con los 3 y modificando el
derivativo ya se quitaban estas oscilaciones y finalmente subiendo el voltaje
el control pudo mantener el SET PONIT en 80 no uno perfecto pero si lo pudo
sostener. De las simulaciones nos podemos dar como actúa cada algoritmo pero
como su nombre lo indica es solo simulación, y por eso los gráficos o las
muestra que nos daban de las temperatura
no eran los más precisos debido que la simulación trata de hacerlo rápido
porque en vida real en nuestro caso, el controlando la temperatura se tarda un
tiempo de calentarse pero a pasar de todo, la simulación nos da un claro
ejemplo de lo aprendido y de lo que se trata un control PID que cada parámetro
tiene una función y que es importante el trabajo de los 3 y por eso sé que
notábamos cuando el profesor nos decía que no existen combinaciones si no solo
PID.
No hay comentarios:
Publicar un comentario