Controlador lógico
programable
PLC
Sistema de Transporte
Objetivo
El objetivo de esta última práctica de PLC 2 es poner en
práctica todo lo visto, enseñado y practicado en clase. Ya como proyecto final
para culminar todo el proceso de aprendizaje de PLC con el TWIDO, básicamente
es mirar que aprendimos y que no faltaría por reforzar, el objetivo general de
haber tenido todo esta aprendizaje, es que a la hora de tener un PLC a nivel de
empresas o una programación ya tener fundamentos básicos de programación y
manejo de manuales de PLC, la parte más importe es la programación ya que es
casi lo mismo para todos lo programa de los PLC es fundamental como funciona
una programación básica de un PLC.
Descripción de
problema
Una empresa requiere implementar
un sistema de transporte el cual desplaza sus materiales de una posición A una
Posición B, manipulado mediante un gabinete de control por un serie de
pulsadores y SUICHES a través de un PLC.
Mecanismo del sistema de transporte

Funcionamiento: El automatismo
debe gozar de cuatro modos de programación, modo manual, modo automático, modo
paro y modo fallo.
-Modo manual: (o modo de
mantenimiento), permite manipular todos los estados y o movimientos de la
maquina o proceso con acciones de marcha o paro según los requerimientos del
operario o personal de mantenimiento. Para el caso del sistema de transporte,
el modo manual permite direccionar el sentido de giro del motor en ambas
direcciones ↔ a voluntad del pulsador seleccionado hacia la derecha o
izquierda. La principal característica de estos sistemas es no poseer retención
y no se ven afectos por otros modos (modo de paro, modo de fallas)
En condiciones de operación del
hardware
• Selector en modo manual.
• Indicador amarrillo encendido.
-Modo automático: En este se
ejecutan una serie de acciones en modo secuencial retornando a condiciones
iniciales tal cual como se presenta a continuación:
En condiciones iniciales:
• Selector en modo automático.
• Sensor A encendido.
• Indicador vede encendido.
Cuando pulse el START:
• Sensor A está encendido
• Motor encendido hacia la
derecha
Cuando el lado derecho del motor
llegue hasta el sensor B:
• Sensor B encendido
• Motor apagado
• Después de 5 segundos se
enciende el motor, desplazándose hacia la izquierda.
Cuando el motor llegue hasta el
lado izquierdo del SENSOR A:
• Sensor A encendido
• Motor apagado
• Después de 5 segundos se
enciende el motor, desplazándose hacia la derecha.
Cuando se halla repetido el ciclo
desde el sensor A hasta el sensor B por 3 veces:
• Sensor A encendido
• Motor apagado
• Indicador de color azul
encendido
Cuando presione el stop del
automático:
• El sistema debe quedar en
condiciones iniciales es decir, sensor A encendido.
• Motor apagado
-Modo paro: Consta de un
mecanismo, botón o pulsador denominado paro emergencia, el cual pausa las acciones
de un mecanismo por completo donde esté y nunca se ejecuta en condiciones
iniciales. Este mecanismo es exigido por normas de seguridad industrial.
Cuando se presione el paro de
emergencia se apaga el sistema en cualquier momento y se deben dar las
siguientes condiciones de operación:
• Motor apagado
• Indicador rojo encendido
• Indicador verde apagado
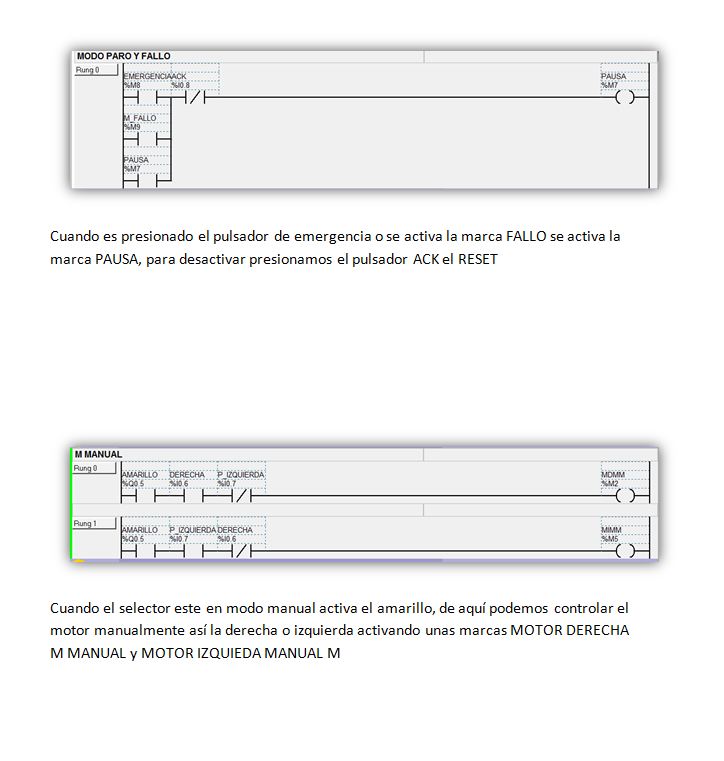
Esquema de general de la programación por modos


----------------------------------------------------------









--------------------------------------------------------------
No hay comentarios:
Publicar un comentario